H Rviz video
Cél, hogy egységes vizuális megjelenése legyen videóinkank, így következő beállításokat kéjük használni beszámoló, youtube videó, előadás, kép, stb esetén.
A nissan_leaf_ros repo tartalmazza a jármű 3D modellt és az RVIZ beállításokat is.
Röviden a lépések catkin_ws workspace esetén:
cd ~/catkin_ws/src
git clone https://github.com/szenergy/nissan_leaf_ros
catkin build nissan_bringup
source ~/.bashrc
roslaunch nissan_bringup 3d_nissan.launch
Megjegyzés: feltételezzük, hogy a bashrc-ben van egy source ~/catkin_ws/devel/setup.bash sor.
Ezután így indítható:
roslaunch nissan_bringup rviz01.launch
Nem kötelező a fenti rviz config használata, ugyanaez a kinézet elérhető, csak a következő minimum feltételei vannak:
- 3D leaf modell (pl.
roslaunch nissan_bringup 3d_nissan.launch) - fehér háttér
- fix LIDAR színezés tehát
Autocompute Intensity Boundshamis, Ousternél az Intensity 0-2000 (min-max), Velodyne esetén 0-200, invert rainbow- további infó: wiki.ros.org/rviz/DisplayTypes/PointCloud
- grid valamelyik global (map) frame-be, opcionálisan (kivétel lehet az autóval mozgó grid, ha kifejezetten az autótól való távolságot szeretnénk szemléttetni)
- Az Eucledian cluster detect távolásgot jelző markere alapból fehér, ezt célszerű átállítani
-
/home/nvidia/autoware.ai/src/autoware/visualization/detected_objects_visualizer/src/visualize_detected_objects.cpp>> 51. sora a 255 fehér helyett legyen 100 szürke pl:private_nh_.param<std::vector<double>>("label_color", color, {100.,100.,100.,1.0});majdAUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select detected_objects_visualizer
-
- A lanelet markerek fehérek, de ezt is könnyen át lehet állítani
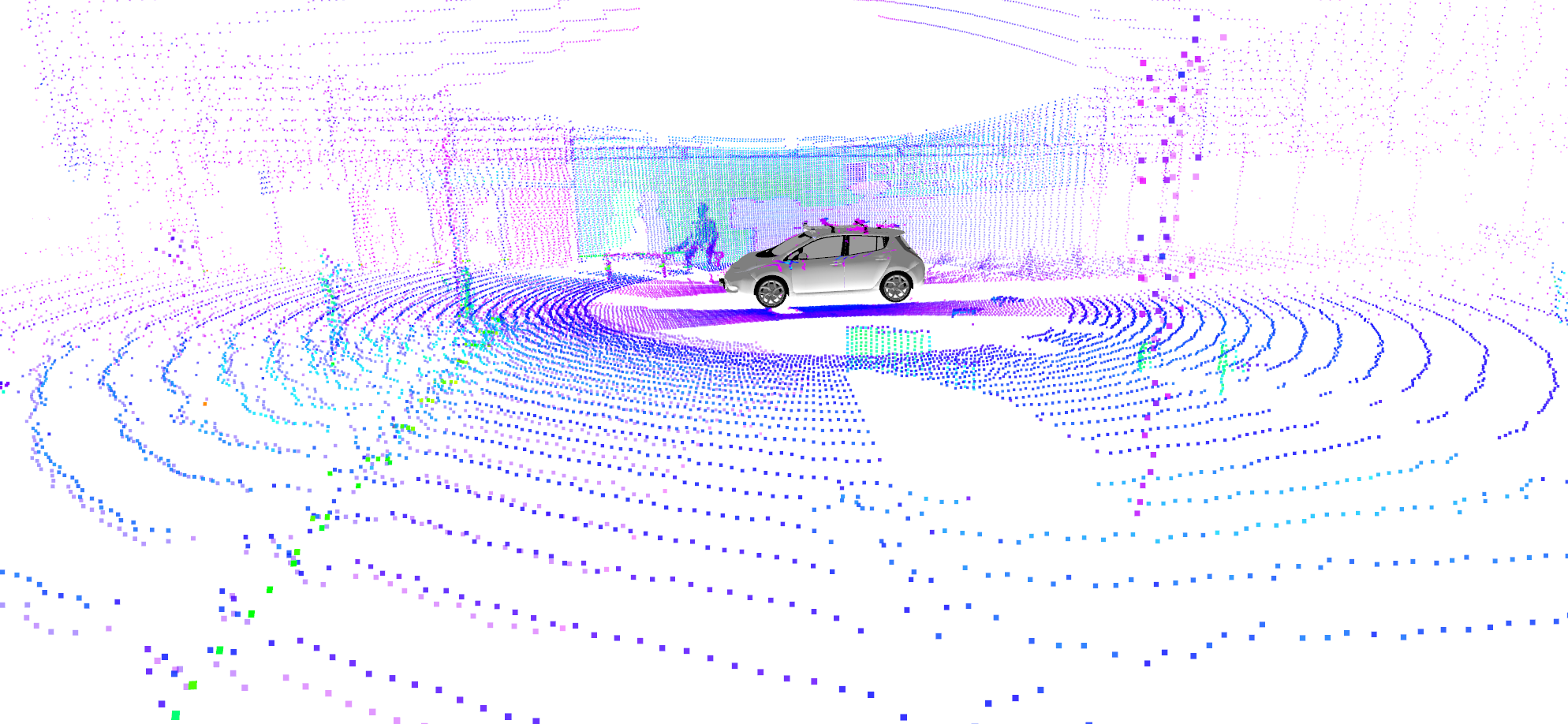
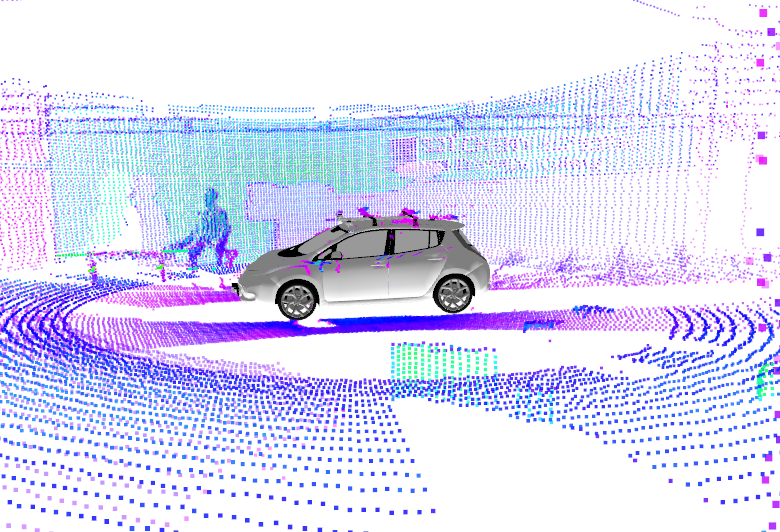
A következőképp kellene nagyjából kinéznie: