Introduction
The technical term for dewarping is "homography", and the matrix to describe the 'dewarping' transform is properly known as the homography matrix
- 📖 See Szeliski (2011) Computer Vision: Algorithms and Applications
(1st ed.)
- §2.1: Geometric primitives and transformations
- §3.6.1: Parametric transformations
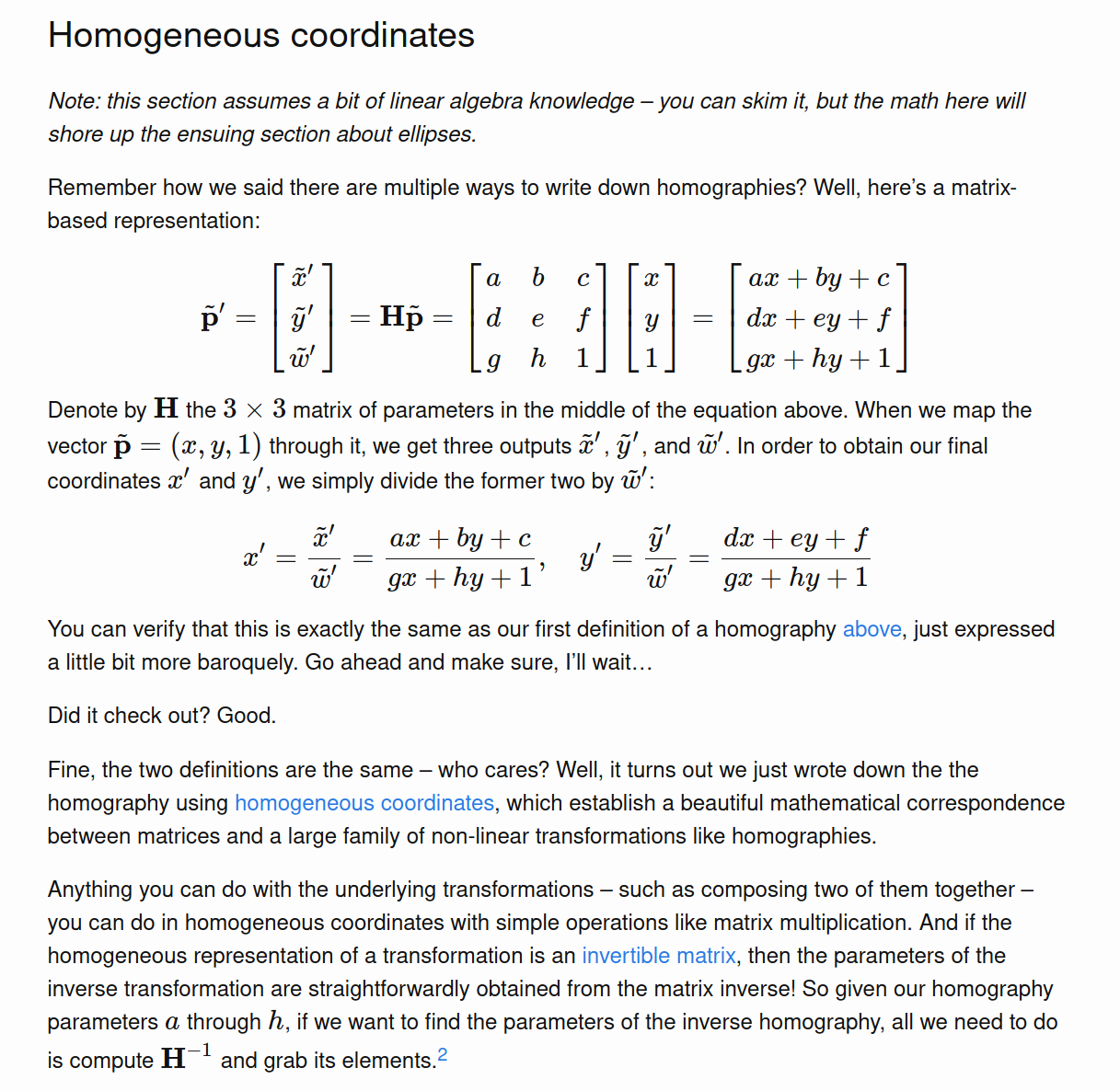
The homography matrix uses homogeneous coordinates, indicated by a tilde over the letters.
Homogeneous coordinates are a column vector of the form [x̃ʹ,ỹʹ,w̃ʹ] where the w̃ʹ can be considered the 'weights' that you divide by to obtain the inhomogeneous coordinates x̃ and ỹ from x̃ʹ and ỹʹ.
Click for a concise explainer on homogeneous coordinates by Matt Zucker & links
- See also Matt's lecture whiteboard notes:
The important point here is that the inverse of a homography will undo it.
- Homographies are a group (Szeliski §2.1.2) meaning they're closed under composition and have an inverse (so if we can compute that inverse we can undo the transformation). This is the key idea in 'dewarping'
Additionally, I put together some further background notes: