参与本项目,贡献其他语言版本的代码,拥抱开源,让更多学习算法的小伙伴们受益!
题目描述:
现有一个 N × M 的矩阵,每个单元格包含一个数值,这个数值代表该位置的相对高度。矩阵的左边界和上边界被认为是第一组边界,而矩阵的右边界和下边界被视为第二组边界。
矩阵模拟了一个地形,当雨水落在上面时,水会根据地形的倾斜向低处流动,但只能从较高或等高的地点流向较低或等高并且相邻(上下左右方向)的地点。我们的目标是确定那些单元格,从这些单元格出发的水可以达到第一组边界和第二组边界。
输入描述:
第一行包含两个整数 N 和 M,分别表示矩阵的行数和列数。
后续 N 行,每行包含 M 个整数,表示矩阵中的每个单元格的高度。
输出描述:
输出共有多行,每行输出两个整数,用一个空格隔开,表示可达第一组边界和第二组边界的单元格的坐标,输出顺序任意。
输入示例:
5 5
1 3 1 2 4
1 2 1 3 2
2 4 7 2 1
4 5 6 1 1
1 4 1 2 1
输出示例:
0 4
1 3
2 2
3 0
3 1
3 2
4 0
4 1
提示信息:
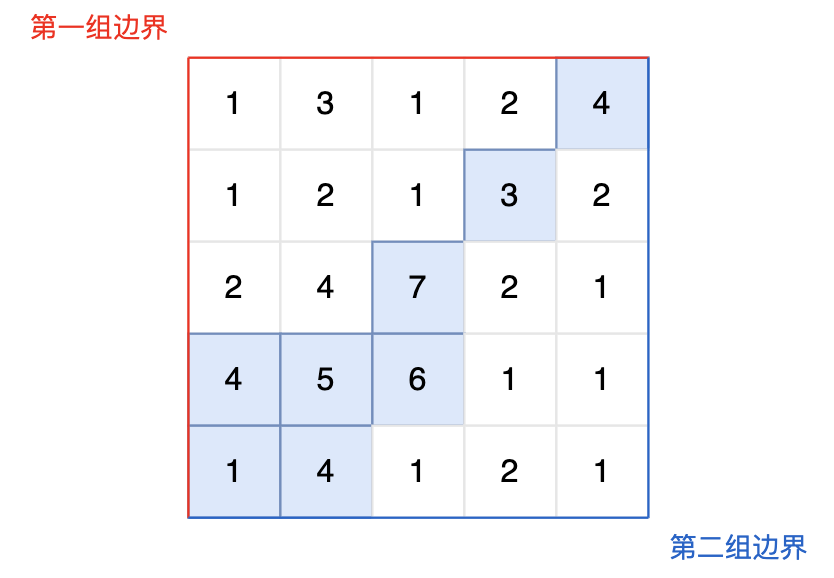
图中的蓝色方块上的雨水既能流向第一组边界,也能流向第二组边界。所以最终答案为所有蓝色方块的坐标。
数据范围:
1 <= M, N <= 50
一个比较直白的想法,其实就是 遍历每个点,然后看这个点 能不能同时到达第一组边界和第二组边界。
至于遍历方式,可以用dfs,也可以用bfs,以下用dfs来举例。
那么这种思路的实现代码如下:
#include <iostream>
#include <vector>
using namespace std;
int n, m;
int dir[4][2] = {-1, 0, 0, -1, 1, 0, 0, 1};
// 从 x,y 出发 把可以走的地方都标记上
void dfs(vector<vector<int>>& grid, vector<vector<bool>>& visited, int x, int y) {
if (visited[x][y]) return;
visited[x][y] = true;
for (int i = 0; i < 4; i++) {
int nextx = x + dir[i][0];
int nexty = y + dir[i][1];
if (nextx < 0 || nextx >= n || nexty < 0 || nexty >= m) continue;
if (grid[x][y] < grid[nextx][nexty]) continue; // 高度不合适
dfs (grid, visited, nextx, nexty);
}
return;
}
bool isResult(vector<vector<int>>& grid, int x, int y) {
vector<vector<bool>> visited(n, vector<bool>(m, false));
// 深搜,将x,y出发 能到的节点都标记上。
dfs(grid, visited, x, y);
bool isFirst = false;
bool isSecond = false;
// 以下就是判断x,y出发,是否到达第一组边界和第二组边界
// 第一边界的上边
for (int j = 0; j < m; j++) {
if (visited[0][j]) {
isFirst = true;
break;
}
}
// 第一边界的左边
for (int i = 0; i < n; i++) {
if (visited[i][0]) {
isFirst = true;
break;
}
}
// 第二边界右边
for (int j = 0; j < m; j++) {
if (visited[n - 1][j]) {
isSecond = true;
break;
}
}
// 第二边界下边
for (int i = 0; i < n; i++) {
if (visited[i][m - 1]) {
isSecond = true;
break;
}
}
if (isFirst && isSecond) return true;
return false;
}
int main() {
cin >> n >> m;
vector<vector<int>> grid(n, vector<int>(m, 0));
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
cin >> grid[i][j];
}
}
// 遍历每一个点,看是否能同时到达第一组边界和第二组边界
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
if (isResult(grid, i, j)) {
cout << i << " " << j << endl;
}
}
}
}
这种思路很直白,但很明显,以上代码超时了。 来看看时间复杂度。
遍历每一个节点,是 m * n,遍历每一个节点的时候,都要做深搜,深搜的时间复杂度是: m * n
那么整体时间复杂度 就是 O(m^2 * n^2) ,这是一个四次方的时间复杂度。
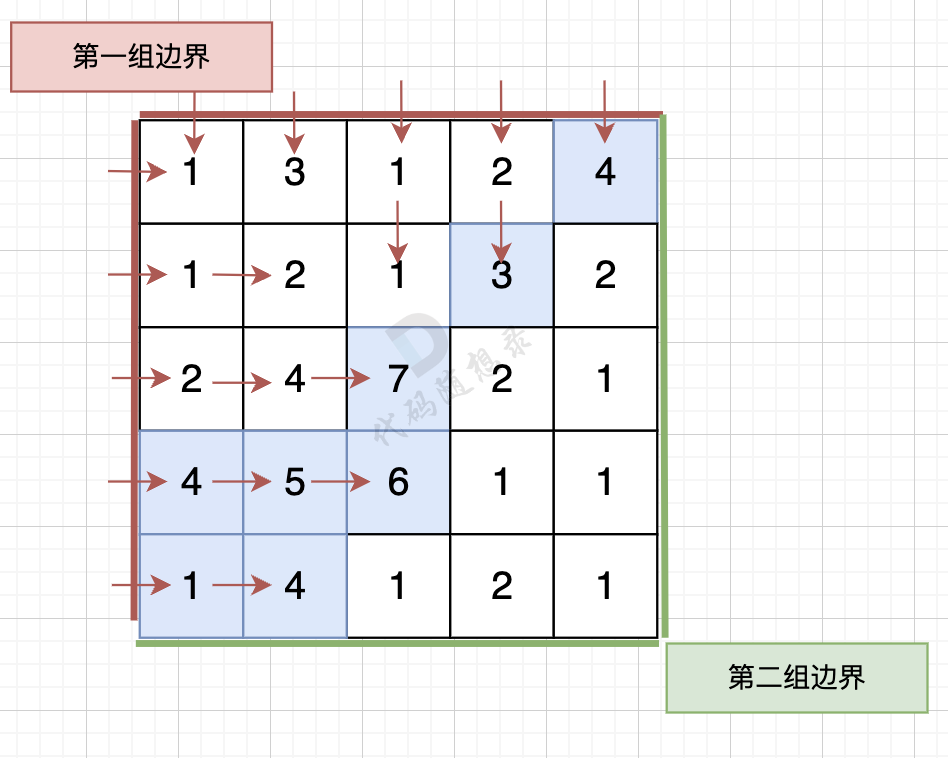
那么我们可以 反过来想,从第一组边界上的节点 逆流而上,将遍历过的节点都标记上。
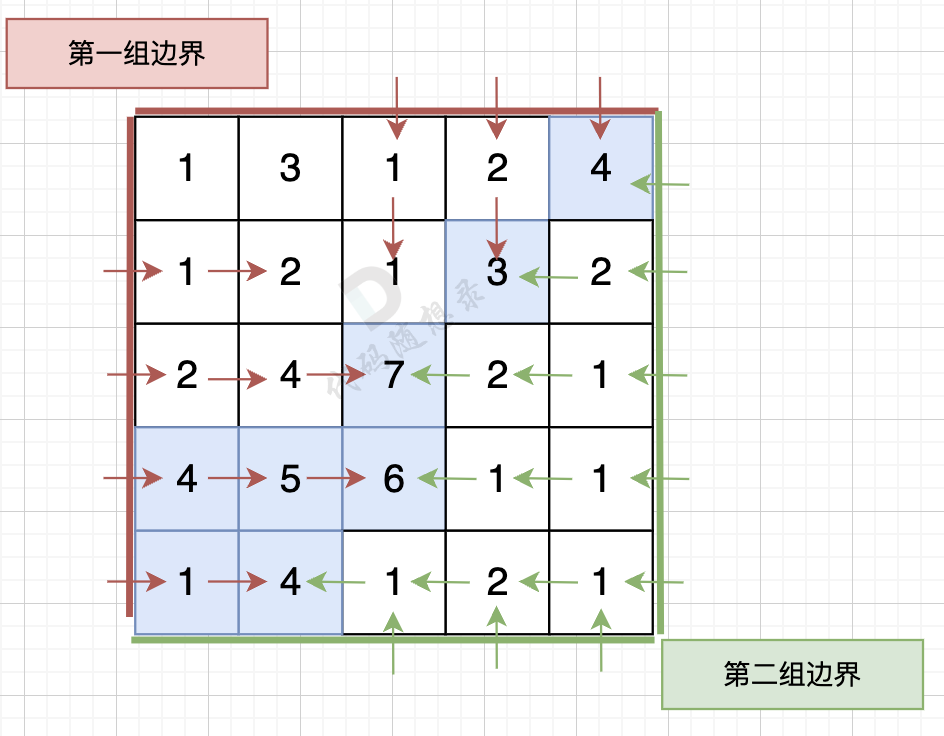
同样从第二组边界的边上节点 逆流而上,将遍历过的节点也标记上。
然后两方都标记过的节点就是既可以流太平洋也可以流大西洋的节点。
从第一组边界边上节点出发,如图:
从第二组边界上节点出发,如图:
按照这样的逻辑,就可以写出如下遍历代码:(详细注释)
#include <iostream>
#include <vector>
using namespace std;
int n, m;
int dir[4][2] = {-1, 0, 0, -1, 1, 0, 0, 1};
void dfs(vector<vector<int>>& grid, vector<vector<bool>>& visited, int x, int y) {
if (visited[x][y]) return;
visited[x][y] = true;
for (int i = 0; i < 4; i++) {
int nextx = x + dir[i][0];
int nexty = y + dir[i][1];
if (nextx < 0 || nextx >= n || nexty < 0 || nexty >= m) continue;
if (grid[x][y] > grid[nextx][nexty]) continue; // 注意:这里是从低向高遍历
dfs (grid, visited, nextx, nexty);
}
return;
}
int main() {
cin >> n >> m;
vector<vector<int>> grid(n, vector<int>(m, 0));
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
cin >> grid[i][j];
}
}
// 标记从第一组边界上的节点出发,可以遍历的节点
vector<vector<bool>> firstBorder(n, vector<bool>(m, false));
// 标记从第一组边界上的节点出发,可以遍历的节点
vector<vector<bool>> secondBorder(n, vector<bool>(m, false));
// 从最上和最下行的节点出发,向高处遍历
for (int i = 0; i < n; i++) {
dfs (grid, firstBorder, i, 0); // 遍历最左列,接触第一组边界
dfs (grid, secondBorder, i, m - 1); // 遍历最右列,接触第二组边界
}
// 从最左和最右列的节点出发,向高处遍历
for (int j = 0; j < m; j++) {
dfs (grid, firstBorder, 0, j); // 遍历最上行,接触第一组边界
dfs (grid, secondBorder, n - 1, j); // 遍历最下行,接触第二组边界
}
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
// 如果这个节点,从第一组边界和第二组边界出发都遍历过,就是结果
if (firstBorder[i][j] && secondBorder[i][j]) cout << i << " " << j << endl;;
}
}
}
时间复杂度分析, 关于dfs函数搜索的过程 时间复杂度是 O(n * m),这个大家比较容易想。
关键看主函数,那么每次dfs的时候,上面还是有for循环的。
第一个for循环,时间复杂度是:n * (n * m) 。
第二个for循环,时间复杂度是:m * (n * m)。
所以本题看起来 时间复杂度好像是 : n * (n * m) + m * (n * m) = (m * n) * (m + n) 。
其实这是一个误区,大家再自己看 dfs函数的实现,其实 有visited函数记录 走过的节点,而走过的节点是不会再走第二次的。
所以 调用dfs函数,只要参数传入的是 数组 firstBorder,那么地图中 每一个节点其实就遍历一次,无论你调用多少次。
同理,调用dfs函数,只要 参数传入的是 数组 secondBorder,地图中每个节点也只会遍历一次。
所以,以下这段代码的时间复杂度是 2 * n * m。 地图用每个节点就遍历了两次,参数传入 firstBorder 的时候遍历一次,参数传入 secondBorder 的时候遍历一次。
// 从最上和最下行的节点出发,向高处遍历
for (int i = 0; i < n; i++) {
dfs (grid, firstBorder, i, 0); // 遍历最左列,接触第一组边界
dfs (grid, secondBorder, i, m - 1); // 遍历最右列,接触第二组边界
}
// 从最左和最右列的节点出发,向高处遍历
for (int j = 0; j < m; j++) {
dfs (grid, firstBorder, 0, j); // 遍历最上行,接触第一组边界
dfs (grid, secondBorder, n - 1, j); // 遍历最下行,接触第二组边界
}那么本题整体的时间复杂度其实是: 2 * n * m + n * m ,所以最终时间复杂度为 O(n * m) 。
空间复杂度为:O(n * m) 这个就不难理解了。开了几个 n * m 的数组。
public class Main {
// 采用 DFS 进行搜索
public static void dfs(int[][] heights, int x, int y, boolean[][] visited, int preH) {
// 遇到边界或者访问过的点,直接返回
if (x < 0 || x >= heights.length || y < 0 || y >= heights[0].length || visited[x][y]) return;
// 不满足水流入条件的直接返回
if (heights[x][y] < preH) return;
// 满足条件,设置为true,表示可以从边界到达此位置
visited[x][y] = true;
// 向下一层继续搜索
dfs(heights, x + 1, y, visited, heights[x][y]);
dfs(heights, x - 1, y, visited, heights[x][y]);
dfs(heights, x, y + 1, visited, heights[x][y]);
dfs(heights, x, y - 1, visited, heights[x][y]);
}
public static void main(String[] args) {
Scanner sc = new Scanner(System.in);
int m = sc.nextInt();
int n = sc.nextInt();
int[][] heights = new int[m][n];
for (int i = 0; i < m; i++) {
for (int j = 0; j < n; j++) {
heights[i][j] = sc.nextInt();
}
}
// 初始化两个二位boolean数组,代表两个边界
boolean[][] pacific = new boolean[m][n];
boolean[][] atlantic = new boolean[m][n];
// 从左右边界出发进行DFS
for (int i = 0; i < m; i++) {
dfs(heights, i, 0, pacific, Integer.MIN_VALUE);
dfs(heights, i, n - 1, atlantic, Integer.MIN_VALUE);
}
// 从上下边界出发进行DFS
for (int j = 0; j < n; j++) {
dfs(heights, 0, j, pacific, Integer.MIN_VALUE);
dfs(heights, m - 1, j, atlantic, Integer.MIN_VALUE);
}
// 当两个边界二维数组在某个位置都为true时,符合题目要求
List<List<Integer>> res = new ArrayList<>();
for (int i = 0; i < m; i++) {
for (int j = 0; j < n; j++) {
if (pacific[i][j] && atlantic[i][j]) {
res.add(Arrays.asList(i, j));
}
}
}
// 打印结果
for (List<Integer> list : res) {
for (int k = 0; k < list.size(); k++) {
if (k == 0) {
System.out.print(list.get(k) + " ");
} else {
System.out.print(list.get(k));
}
}
System.out.println();
}
}
}first = set()
second = set()
directions = [[-1, 0], [0, 1], [1, 0], [0, -1]]
def dfs(i, j, graph, visited, side):
if visited[i][j]:
return
visited[i][j] = True
side.add((i, j))
for x, y in directions:
new_x = i + x
new_y = j + y
if (
0 <= new_x < len(graph)
and 0 <= new_y < len(graph[0])
and int(graph[new_x][new_y]) >= int(graph[i][j])
):
dfs(new_x, new_y, graph, visited, side)
def main():
global first
global second
N, M = map(int, input().strip().split())
graph = []
for _ in range(N):
row = input().strip().split()
graph.append(row)
# 是否可到达第一边界
visited = [[False] * M for _ in range(N)]
for i in range(M):
dfs(0, i, graph, visited, first)
for i in range(N):
dfs(i, 0, graph, visited, first)
# 是否可到达第二边界
visited = [[False] * M for _ in range(N)]
for i in range(M):
dfs(N - 1, i, graph, visited, second)
for i in range(N):
dfs(i, M - 1, graph, visited, second)
# 可到达第一边界和第二边界
res = first & second
for x, y in res:
print(f"{x} {y}")
if __name__ == "__main__":
main()const r1 = require('readline').createInterface({ input: process.stdin });
// 创建readline接口
let iter = r1[Symbol.asyncIterator]();
// 创建异步迭代器
const readline = async () => (await iter.next()).value;
let graph // 地图
let N, M // 地图大小
const dir = [[0, 1], [1, 0], [0, -1], [-1, 0]] //方向
// 读取输入,初始化地图
const initGraph = async () => {
let line = await readline();
[N, M] = line.split(' ').map(Number);
graph = new Array(N).fill(0).map(() => new Array(M).fill(0))
for (let i = 0; i < N; i++) {
line = await readline()
line = line.split(' ').map(Number)
for (let j = 0; j < M; j++) {
graph[i][j] = line[j]
}
}
}
/**
* @description: 从(x,y)开始深度优先遍历地图
* @param {*} graph 地图
* @param {*} visited 可访问节点
* @param {*} x 开始搜索节点的下标
* @param {*} y 开始搜索节点的下标
* @return {*}
*/
const dfs = (graph, visited, x, y) => {
if (visited[x][y]) return
visited[x][y] = true // 标记为可访问
for (let i = 0; i < 4; i++) {
let nextx = x + dir[i][0]
let nexty = y + dir[i][1]
if (nextx < 0 || nextx >= N || nexty < 0 || nexty >= M) continue //越界,跳过
if (graph[x][y] < graph[nextx][nexty]) continue //不能流过.跳过
dfs(graph, visited, nextx, nexty)
}
}
/**
* @description: 判断地图上的(x, y)是否可以到达第一组边界和第二组边界
* @param {*} x 坐标
* @param {*} y 坐标
* @return {*} true可以到达,false不可以到达
*/
const isResult = (x, y) => {
let visited = new Array(N).fill(false).map(() => new Array(M).fill(false))
let isFirst = false //是否可到达第一边界
let isSecond = false //是否可到达第二边界
// 深搜,将(x, y)可到达的所有节点做标记
dfs(graph, visited, x, y)
// 判断能否到第一边界左边
for (let i = 0; i < N; i++) {
if (visited[i][0]) {
isFirst = true
break
}
}
// 判断能否到第一边界上边
for (let j = 0; j < M; j++) {
if (visited[0][j]) {
isFirst = true
break
}
}
// 判断能否到第二边界右边
for (let i = 0; i < N; i++) {
if (visited[i][M - 1]) {
isSecond = true
break
}
}
// 判断能否到第二边界下边
for (let j = 0; j < M; j++) {
if (visited[N - 1][j]) {
isSecond = true
break
}
}
return isFirst && isSecond
}
(async function () {
// 读取输入,初始化地图
await initGraph()
// 遍历地图,判断是否能到达第一组边界和第二组边界
for (let i = 0; i < N; i++) {
for (let j = 0; j < M; j++) {
if (isResult(i, j)) console.log(i + ' ' + j);
}
}
})()const r1 = require('readline').createInterface({ input: process.stdin });
// 创建readline接口
let iter = r1[Symbol.asyncIterator]();
// 创建异步迭代器
const readline = async () => (await iter.next()).value;
let graph // 地图
let N, M // 地图大小
const dir = [[0, 1], [1, 0], [0, -1], [-1, 0]] //方向
// 读取输入,初始化地图
const initGraph = async () => {
let line = await readline();
[N, M] = line.split(' ').map(Number);
graph = new Array(N).fill(0).map(() => new Array(M).fill(0))
for (let i = 0; i < N; i++) {
line = await readline()
line = line.split(' ').map(Number)
for (let j = 0; j < M; j++) {
graph[i][j] = line[j]
}
}
}
/**
* @description: 从(x,y)开始广度优先遍历地图
* @param {*} graph 地图
* @param {*} visited 可访问节点
* @param {*} x 开始搜索节点的下标
* @param {*} y 开始搜索节点的下标
* @return {*}
*/
const bfs = (graph, visited, x, y) => {
let queue = []
queue.push([x, y])
visited[x][y] = true
while (queue.length) {
const [xx, yy] = queue.shift()
for (let i = 0; i < 4; i++) {
let nextx = xx + dir[i][0]
let nexty = yy + dir[i][1]
if (nextx < 0 || nextx >= N || nexty < 0 || nexty >= M) continue //越界, 跳过
// 可访问或者不能流过, 跳过 (注意这里是graph[xx][yy] < graph[nextx][nexty], 不是graph[x][y] < graph[nextx][nexty])
if (visited[nextx][nexty] || graph[xx][yy] < graph[nextx][nexty]) continue
queue.push([nextx, nexty])
visited[nextx][nexty] = true
}
}
}
/**
* @description: 判断地图上的(x, y)是否可以到达第一组边界和第二组边界
* @param {*} x 坐标
* @param {*} y 坐标
* @return {*} true可以到达,false不可以到达
*/
const isResult = (x, y) => {
let visited = new Array(N).fill(false).map(() => new Array(M).fill(false))
let isFirst = false //是否可到达第一边界
let isSecond = false //是否可到达第二边界
// 深搜,将(x, y)可到达的所有节点做标记
bfs(graph, visited, x, y)
// console.log(visited);
// 判断能否到第一边界左边
for (let i = 0; i < N; i++) {
if (visited[i][0]) {
isFirst = true
break
}
}
// 判断能否到第一边界上边
for (let j = 0; j < M; j++) {
if (visited[0][j]) {
isFirst = true
break
}
}
// 判断能否到第二边界右边
for (let i = 0; i < N; i++) {
if (visited[i][M - 1]) {
isSecond = true
break
}
}
// 判断能否到第二边界下边
for (let j = 0; j < M; j++) {
if (visited[N - 1][j]) {
isSecond = true
break
}
}
return isFirst && isSecond
}
(async function () {
// 读取输入,初始化地图
await initGraph()
// 遍历地图,判断是否能到达第一组边界和第二组边界
for (let i = 0; i < N; i++) {
for (let j = 0; j < M; j++) {
if (isResult(i, j)) console.log(i + ' ' + j);
}
}
})()从第一边界和第二边界开始向高处流, 标记可以流到的位置, 两个边界都能到达的位置就是所求结果
const r1 = require('readline').createInterface({ input: process.stdin });
// 创建readline接口
let iter = r1[Symbol.asyncIterator]();
// 创建异步迭代器
const readline = async () => (await iter.next()).value;
let graph // 地图
let N, M // 地图大小
const dir = [[0, 1], [1, 0], [0, -1], [-1, 0]] //方向
// 读取输入,初始化地图
const initGraph = async () => {
let line = await readline();
[N, M] = line.split(' ').map(Number);
graph = new Array(N).fill(0).map(() => new Array(M).fill(0))
for (let i = 0; i < N; i++) {
line = await readline()
line = line.split(' ').map(Number)
for (let j = 0; j < M; j++) {
graph[i][j] = line[j]
}
}
}
/**
* @description: 从(x,y)开始广度优先遍历地图
* @param {*} graph 地图
* @param {*} visited 可访问节点
* @param {*} x 开始搜索节点的下标
* @param {*} y 开始搜索节点的下标
* @return {*}
*/
const bfs = (graph, visited, x, y) => {
if(visited[x][y]) return
let queue = []
queue.push([x, y])
visited[x][y] = true
while (queue.length) {
const [xx, yy] = queue.shift()
for (let i = 0; i < 4; i++) {
let nextx = xx + dir[i][0]
let nexty = yy + dir[i][1]
if (nextx < 0 || nextx >= N || nexty < 0 || nexty >= M) continue //越界, 跳过
// 可访问或者不能流过, 跳过 (注意因为是从边界往高处流, 所以这里是graph[xx][yy] >= graph[nextx][nexty], 还要注意不是graph[xx][yy] >= graph[nextx][nexty])
if (visited[nextx][nexty] || graph[xx][yy] >= graph[nextx][nexty]) continue
queue.push([nextx, nexty])
visited[nextx][nexty] = true
}
}
}
(async function () {
// 读取输入,初始化地图
await initGraph()
// 记录第一边界可到达的节点
let firstBorder = new Array(N).fill(false).map(() => new Array(M).fill(false))
// 记录第二边界可到达的节点
let secondBorder = new Array(N).fill(false).map(() => new Array(M).fill(false))
// 第一边界左边和第二边界右边
for (let i = 0; i < N; i++) {
bfs(graph, firstBorder, i, 0)
bfs(graph, secondBorder, i, M - 1)
}
// 第一边界上边和第二边界下边
for (let j = 0; j < M; j++) {
bfs(graph, firstBorder, 0, j)
bfs(graph, secondBorder, N - 1, j)
}
// 遍历地图,判断是否能到达第一组边界和第二组边界
for (let i = 0; i < N; i++) {
for (let j = 0; j < M; j++) {
if (firstBorder[i][j] && secondBorder[i][j]) console.log(i + ' ' + j);
}
}
})()