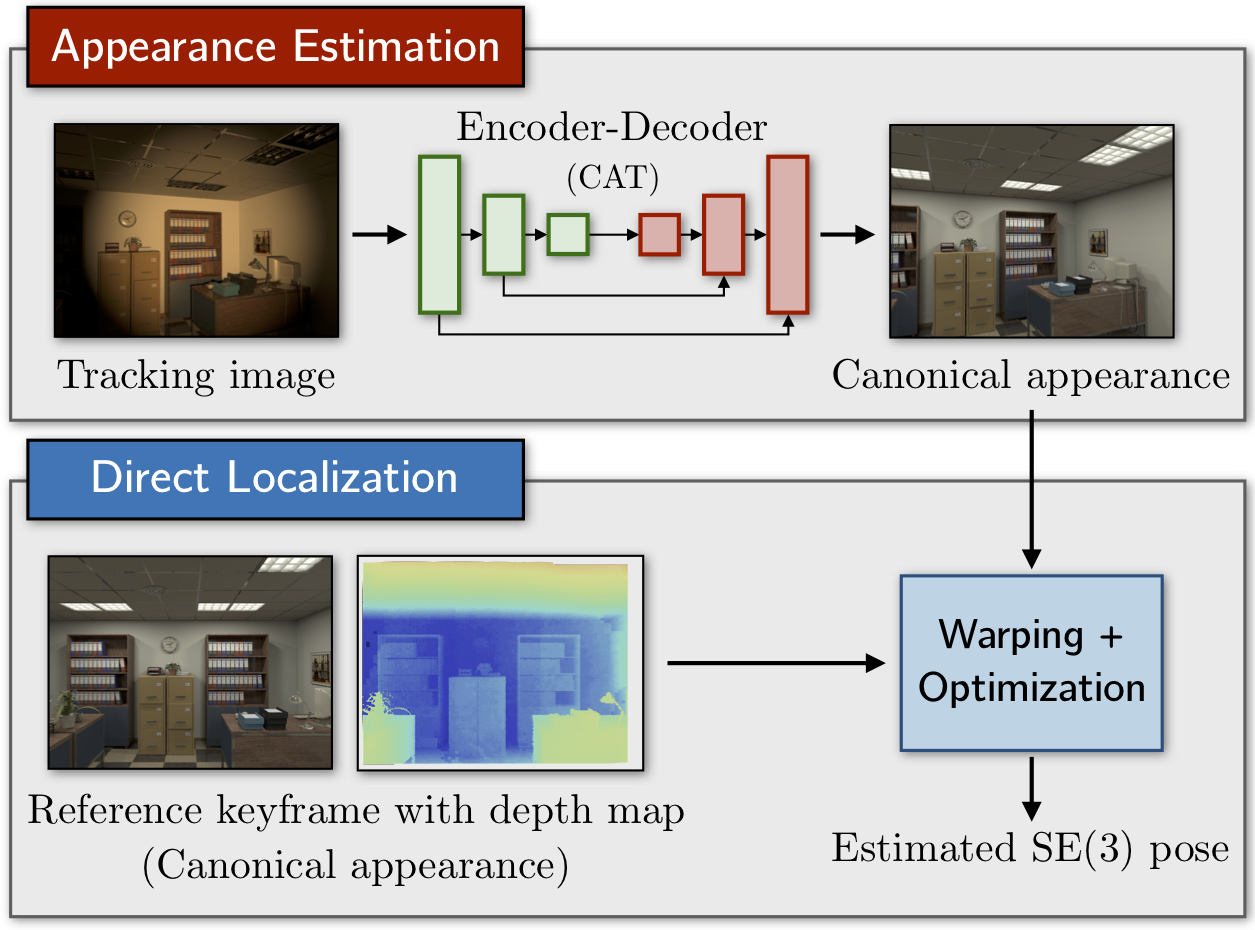
Code to accompany our paper "How to Train a CAT: Learning Canonical Appearance Transformations for Direct Visual Localization Under Illumination Change".
- numpy
- matpotlib
- pytorch + torchvision (1.2)
- Pillow
- progress (for progress bars in train/val/test loops)
- tensorboard + tensorboardX (for visualization)
- pyslam + liegroups (optional, for running odometry/localization experiments)
- OpenCV (optional, for running odometry/localization experiments)
- Download the ETHL dataset from here or the Virtual KITTI dataset from here
- ETHL only: rename
ethl1/2toethl1/2_static. - ETHL only: Update the local paths in
tools/make_ethl_real_sync.pyand runpython3 tools/make_ethl_real_sync.pyto generate a synchronized copy of therealsequences.
- ETHL only: rename
- Update the local paths in
run_cat_ethl/vkitti.pyand runpython3 run_cat_ethl/vkitti.pyto start training. - In another terminal run
tensorboard --port [port] --logdir [path]to start the visualization server, where[port]should be replaced by a numeric value (e.g., 60006) and[path]should be replaced by your local results directory. - Tune in to
localhost:[port]and watch the action.
- Ensure the pyslam and liegroups packages are installed.
- Update the local paths in
make_localization_data.pyand runpython3 make_localization_data.py [dataset]to compile the model outputs into alocalization_datadirectory. - Update the local paths in
run_localization_[dataset].pyand runpython3 run_localization_[dataset].py [rgb,cat]to compute VO and localization results using either the original RGB or CAT-transformed images. - You can compute localization errors against ground truth using the
compute_localization_errors.pyscript, which generates CSV files and several plots. Update the local paths and runpython3 compute_localization_errors.py [dataset].
If you use this code in your research, please cite:
@article{2018_Clement_Learning,
author = {Lee Clement and Jonathan Kelly},
journal = {{IEEE} Robotics and Automation Letters},
link = {https://arxiv.org/abs/1709.03009},
title = {How to Train a {CAT}: Learning Canonical Appearance Transformations for Direct Visual Localization Under Illumination Change},
year = {2018}
}