- Why Assembly
- Binary, Hex and Endians
- How Does A Processor Work
- Basic Registers
- Basic x86 Instructions
- Calling Conventions and Stack Frames
- Hands-on Exercises
- Resources
- References
To understand why assembly is useful, we must be aware of how a programme is created. First, we humans code it in a high level language, then compile it. The compiler then translates that into lower level languages, and finally into binary, which the computer understands.
In between the high level code and binary is the assembly. Oftentimes, we may want to find out what a programme does, but the source code may not be freely available to us. By analysing the assembly through an object dump of an executable programme, we may trace line by line what a programme does, and then reverse engineer it to get the source code.
Our layman numbers are in base 10 form. Hexadecimal numbers, like its name suggests, are numbers in the base 16 form.
+-------------+----------+--------------+------------+
| Hexadecimal | Decimal | Hexadecimal | Decimal |
+-------------+----------+--------------+------------+
| 0 | 0 | A | 10 |
| 1 | 1 | B | 11 |
| 2 | 2 | C | 12 |
| 3 | 3 | D | 13 |
| 4 | 4 | E | 14 |
| 5 | 5 | F | 15 |
| 6 | 6 | | |
| 7 | 7 | | |
| 8 | 8 | | |
| 9 | 9 | | |
+-------------+----------+--------------+------------+
The value of a decimal number is as follows. Considering the number: (1234) 10
(1234) 10 = 1(10)3 + 2(10)2 + 3(10)1+ 4(10)0 = (1234) 10
###Hexadecimal Similarly, the value of hexadecimals can be derived the same way. Considering the number: (3D2F) 16
(3D2F) 16 = 3(16)3 + 13(16)2 + 2(16)1+ 15(16)0 = (15663) 10
###0x prefix
In C based languages, hexadecimal numbers are prepended with a 0x to tell the compiler that the number following is a hexadecimal.
(3D2F) 16 will therefore appear as 0x3D2F
##Little Endian and Big Endian These two standards describe the order in which a sequence of bytes are stored in a computer’s memory.
This order is important and must be known to the language compilers in order for values to be stored.
Most of the time, the Big Endian standard is adopted as it is more intuitive. However, in certain cases like in Intel CPUs the Little Endian standard may be used, as this simplifies certain operations, thus improving efficiency.
###Big Endian The ‘Big End’, ie. the most significant value in the sequence of bytes is stored into the smallest address, at the top of the stack.
###Little Endian The ‘Little End’ ie. the least significant value in the sequence of bytes, is stored first into the smallest address, at the top of the stack.
The Little Endian standard is used in x86.
This is not a computer architecture class. I am just going to tell you that a processor has a number of registers that can be used as temporary store of values, and one or more arithmetic and logic units (ALUs) that can perform operations on the registers.
The processor fetches instructions from the memory, determines what to do, be it adding two numbers or loading data from the memory, and executes it.
In x86, there are a lot of registers. We will only focus on the ones that we can usually see in assembly codes, including 8 of the 16 general purpose registers and 2 status registers.
First there are the 4 classical A, B, C, D registers. Take A as an example, the 64-bit version is named rax, the 32-bit version is named eax, the 16-bit version is named ax, the higher 8-bit of the 16-bit is named ah and the lower 8-bit of the 16-bit is named al. This is how it looks like:
rax
_________________________/ \_________________________
/ \
+---------------------------+---------------------------+
| | |
| | eax |
| | |
| | +-------------+
| | | ax |
| | +------+------+
| | | ah | al |
+---------------------------+-------------+------+------+
It is the same for all the four A, B, C, D registers, even for the next four general purpose registers that we are going to talk about: rsi, rdi, rbp, and rsp.
rsi and rdi are index registers, often used for indexed addressing.
rbp and rsp are pointer registers. Although they are general purpose registers, they are often reserved for stack operations: rbp for base pointer, and rsp for stack pointer. We will talk more about stacks later.
There are only two status registers in x86.
The first one is rflags / eflags / flags. It holds a lot of information about the ongoing processing, such as the last comparison result, last computation result, whether there was an overflow, whether interrupts should be ignored, etc. For example, if you have something in your code like if (a > b) { ... }, it will be compiled into two instructions. The first instruction compares a and b and store the result in rflags, the second instructions checks rflags and decide whether to branch or not.
The second one is rip / eip / ip, which is the instruction pointer. It points to the next instruction that the processor will be executing. If we can control where the instruction pointer poionts to, we can manipulate the control flow of the program.
| AT&T | Intel | |
|---|---|---|
| Parameter Order | instruction src dst | instruction dst src |
| Sigils | Constants are prefixed with $ Registers are prefixed with % |
Assembler automatically detects |
- Immediate addressing - Register addressing - Memory addressing
$0x1 = constant value 1
%eax = register value
0x4(%eax) = memory address(register value + 4)
- b (byte = 8 bits) - w (word = 2 bytes = 16 bits) - l (long = 4 bytes = 32 bits)
E.g. movw, pushl
mov - Move
Copies the data from src to dst.
mov %eax, %edx --> edx = eax
mov $0x4, %edx --> edx = 0x4
mov $0x4, 0x4(%edx) --> mem(0x8) = 0x4
However memory-to-memory moves are not possible, you will have to load the value into register before copying into the destination memory.
Cannot be done:
mov 0x4(%eax), 0x8(%eax)
Correct method:
mov 0x4(%eax), %edx
mov %edx , 0x8(%eax)
push - Push stack
Writing a value into the stack.
push $0x4 --> 0x4 is now in stack
pop - Pop stack
Restoring value that is on top of the stack
pop %eax --> eax = 0x4, 0x4 is gone from stack
Adds src and dst, and store results in dst ``` mov $0x4, %eax --> eax = 4 add $0x4, %eax --> eax = 8 ```
sub - Integer Subtraction
Subtracts src from dst, and store results in dst
mov $0x8, %eax --> eax = 8
sub $0x4, %eax --> eax = 4
imul - Integer Multiplication
imul instruction has two formats - two-operands format and three-operands format. For both, the dst must be a register.
Two operands:
mov $0x4, %eax --> eax = 4
imul $0x4, %eax --> eax = 16
Three operands:
mov $0x4, %eax --> eax = 4
imul $0x4, %eax, %edx --> edx = 16
idiv - Integer Division
idiv instruction takes in only one operand, either register or memory address. It only works with signed numbers. Dividend is always either AH:AL (byte), DX:AX (word) or EDX:EAX (long). Quotient results will be stored in EAX and remainder is stored in EDX.
mov $0x2, %ebx --> ebx = 2
mov $0x4, %eax --> eax = 4
cltd --> convert signed long to signed double long (EAX -> EDX:EAX)
idiv %ebx --> eax = 2, edx = 0
and, or, xor - Bitwise Operations
Logical bitwise and, or, and exclusive or operations.
mov $0x4, %eax --> eax = 4
and $0xf, %eax --> eax = 4
and $0x0, %eax --> eax = 0
mov $0x4, %eax --> eax = 4
or $0xf, %eax --> eax = 15
or $0x0, %eax --> eax = 4
mov $0x4, %eax --> eax = 4
xor $0xf, %eax --> eax = 11
xor $0x0, %eax --> eax = 4
not - Bitwise Logical Not
not instruction takes in only one operand. Flips all bit values in the operand.
mov $0x4, %eax --> eax = 4
not %eax --> eax = 4,294,967,291 (-5 if signed)
neg - Negate
Performs two’s complement negation on operand contents, which is essentially ‘not + 1’.
mov $0x4, %eax --> eax = 4
neg %eax --> eax = 4,294,967,292 (-4 if signed)
shl, shr - Shift Left, Shift Right
Shift bits left and shift bits right.
mov $0x4 , %eax --> eax = 4
shl $0x1 , %eax --> eax = 8
shl $0x1c, %eax --> eax = 2,147,483,648 (-2,147,483,648 if signed)
sh1 $0x1 , %eax --> eax = 0
mov $0x4, %eax --> eax = 4
shr $0x1, %eax --> eax = 2
shr $0x1c, %eax --> eax = 0
jmp - Jump
Causes the program to execute instruction at another memory address.
HelloWorld: mov $0x4, %eax
jmp HelloWorld --> Infinite loop, don’t do this.
cmp - Compare
Compare values of src and dst by using sub instruction and stores into a special register called ‘Machine Status Word’ (MSW). cmp instruction is usually used before conditional jump instructions, and the result stored in the special register is referred to by them.
mov $0x4, %eax --> eax = 4
mov $0x1, %edx --> edx = 1
cmp %eax, %edx --> msw = -3
jcondition - Conditional Jump
- je - Jump when Equal
- jz - Jump when Zero
- jne - Jump when Not Equal
- jg - Jump when Greater Than
- jge - Jump when Greater Than or Equal To
- jl - Jump when Less Than
- jle - Jump when Less Than or Equal To
mov $0x4, %eax --> eax = 4
mov $0x1, %edx --> edx = 1
cmp %eax, %edx --> msw = -3
je HelloWorld --> don’t jump
jz HelloWorld --> don’t jump
jne HelloWorld --> jump
jg HelloWorld --> don’t jump
jge HelloWorld --> don’t jump
jl HelloWorld --> jump
jle HelloWorld --> jump
call, ret - Subroutine call and Return
call instruction will push current code location onto stack.
ret will pop the code location and perform an unconditional jump to it.
call HelloWorld
ret
To allow programs written by different programmers to be able to call one another, and to simplify the use of subroutines in general, programmers and compilers typically adopt a common calling convention. The calling convention is a protocol about how the call and return from subroutines, such as which registers are for arguments and which register stores the return value. With that, a programmer does not need to read the definition of a subroutine to determine how to pass parameters to that subroutine and how to get the return value from it.
Although we are not writing assembly, knowing the calling convention helps us to understand typical assembly code more easily. In this section, we will learn about the widely used C language calling convention.
These are the steps to call a subroutine:
- Passing parameters
a. On 32-bit systems, all arguments are pushed onto the stack in reverse order
b. On 64-bit systems, the first 6 arguments are moved into registers in the following order:
rdi,rsi,rdx,rcx,r8,r9. Then the rest of the arguments are pushed onto the stack in reverse order - Invode
call/callq, which will push the return address onto the stack, then jump to the subroutine (the callee) - The callee pushes the value of
rbp/ebponto the stack, then copies the value ofrsp/espintorbp/ebp - The callee allocates local variables by making space on the stack
- When the callee returns, it leaves the return value in
rax/eax, copiesrbp/ebpback torsp/esp, then pops the savedrbp/ebpand transfer control to the caller by invokingret.
This is the stack frame of a subroutine that has 3 parameters and 3 local variables:
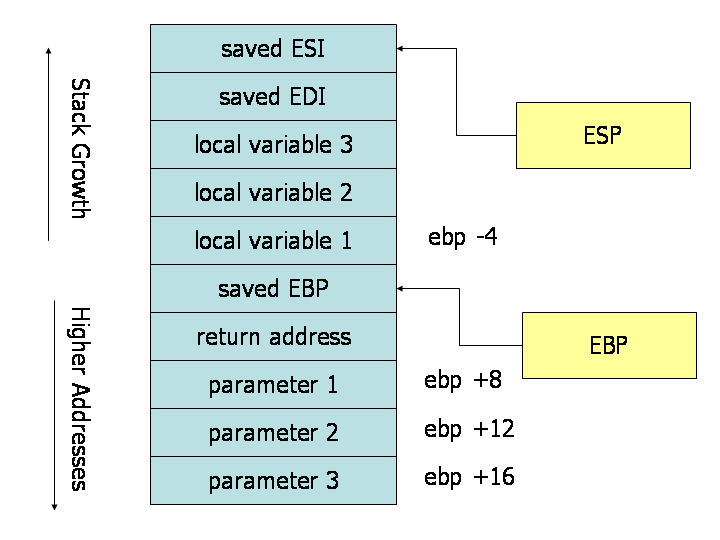
Note that the stack grows from higher addresses to lower addresses. The figure above is for a 32-bit system, so each cell in the stack is 32-bit wide, therefore the memory addresses are 4 bytes apart. (Use of e-prefixed registers also shows that it is 32-bit.)
Below is the assembly of a program that adds three hardcoded numbers and prints out the result, compiled in 32-bit.
0804840b <add_three>:
804840b: 55 push %ebp
804840c: 89 e5 mov %esp,%ebp
804840e: 83 ec 10 sub $0x10,%esp
8048411: 8b 45 08 mov 0x8(%ebp),%eax
8048414: 89 45 f4 mov %eax,-0xc(%ebp)
8048417: 8b 45 0c mov 0xc(%ebp),%eax
804841a: 89 45 f8 mov %eax,-0x8(%ebp)
804841d: 8b 45 10 mov 0x10(%ebp),%eax
8048420: 89 45 fc mov %eax,-0x4(%ebp)
8048423: 8b 55 f4 mov -0xc(%ebp),%edx
8048426: 8b 45 f8 mov -0x8(%ebp),%eax
8048429: 01 c2 add %eax,%edx
804842b: 8b 45 fc mov -0x4(%ebp),%eax
804842e: 01 d0 add %edx,%eax
8048430: c9 leave
8048431: c3 ret
08048432 <main>:
8048432: 8d 4c 24 04 lea 0x4(%esp),%ecx
8048436: 83 e4 f0 and $0xfffffff0,%esp
8048439: ff 71 fc pushl -0x4(%ecx)
804843c: 55 push %ebp
804843d: 89 e5 mov %esp,%ebp
804843f: 51 push %ecx
8048440: 83 ec 14 sub $0x14,%esp
8048443: 6a 03 push $0x3
8048445: 6a 02 push $0x2
8048447: 6a 01 push $0x1
8048449: e8 bd ff ff ff call 804840b <add_three>
804844e: 83 c4 0c add $0xc,%esp
8048451: 89 45 f4 mov %eax,-0xc(%ebp)
8048454: 83 ec 08 sub $0x8,%esp
8048457: ff 75 f4 pushl -0xc(%ebp)
804845a: 68 00 85 04 08 push $0x8048500
804845f: e8 7c fe ff ff call 80482e0 <printf@plt>
8048464: 83 c4 10 add $0x10,%esp
8048467: b8 00 00 00 00 mov $0x0,%eax
804846c: 8b 4d fc mov -0x4(%ebp),%ecx
804846f: c9 leave
8048470: 8d 61 fc lea -0x4(%ecx),%esp
8048473: c3 ret
Here's the 64-bit version of the same program. Take note that the arguments are passed using registers rather than pushing them onto the stack.
0000000000400526 <add_three>:
400526: 55 push %rbp
400527: 48 89 e5 mov %rsp,%rbp
40052a: 89 7d ec mov %edi,-0x14(%rbp)
40052d: 89 75 e8 mov %esi,-0x18(%rbp)
400530: 89 55 e4 mov %edx,-0x1c(%rbp)
400533: 8b 45 ec mov -0x14(%rbp),%eax
400536: 89 45 f4 mov %eax,-0xc(%rbp)
400539: 8b 45 e8 mov -0x18(%rbp),%eax
40053c: 89 45 f8 mov %eax,-0x8(%rbp)
40053f: 8b 45 e4 mov -0x1c(%rbp),%eax
400542: 89 45 fc mov %eax,-0x4(%rbp)
400545: 8b 55 f4 mov -0xc(%rbp),%edx
400548: 8b 45 f8 mov -0x8(%rbp),%eax
40054b: 01 c2 add %eax,%edx
40054d: 8b 45 fc mov -0x4(%rbp),%eax
400550: 01 d0 add %edx,%eax
400552: 5d pop %rbp
400553: c3 retq
0000000000400554 <main>:
400554: 55 push %rbp
400555: 48 89 e5 mov %rsp,%rbp
400558: 48 83 ec 10 sub $0x10,%rsp
40055c: ba 03 00 00 00 mov $0x3,%edx
400561: be 02 00 00 00 mov $0x2,%esi
400566: bf 01 00 00 00 mov $0x1,%edi
40056b: e8 b6 ff ff ff callq 400526 <add_three>
400570: 89 45 fc mov %eax,-0x4(%rbp)
400573: 8b 45 fc mov -0x4(%rbp),%eax
400576: 89 c6 mov %eax,%esi
400578: bf 14 06 40 00 mov $0x400614,%edi
40057d: b8 00 00 00 00 mov $0x0,%eax
400582: e8 79 fe ff ff callq 400400 <printf@plt>
400587: b8 00 00 00 00 mov $0x0,%eax
40058c: c9 leaveq
40058d: c3 retq
Under ./build/ there are three programs whose names has the word "secret" in them. Try disassemble them and figure out what they do. Both 32-bit and 64-bit binaries are provided. The source code are in the ./src/ folder but please do not look at them before you attempt.
If you do not know how to disassemble a binary yet, one way to do it is:
$ objdump -d <binary_file>