[TOC]
IMU 预积分技术最早由 T Lupton 于 12 年提出,C Forster 于 15 年将其进一步拓展到李代数上,形成了一套优雅的理论体系。Forster 将 IMU 预积分在开源因子图优化库 GTSAM 中进行了实现,并完成了和其另一大作 SVO 的组合。这套理论目前已经被广泛的应用在基于 Bundle Adjustment 优化框架的 Visual Inertial Odometry 中。其中包括 VI-ORBSLAM,港科大 VINS,百度/浙大 ICE-BA 等。
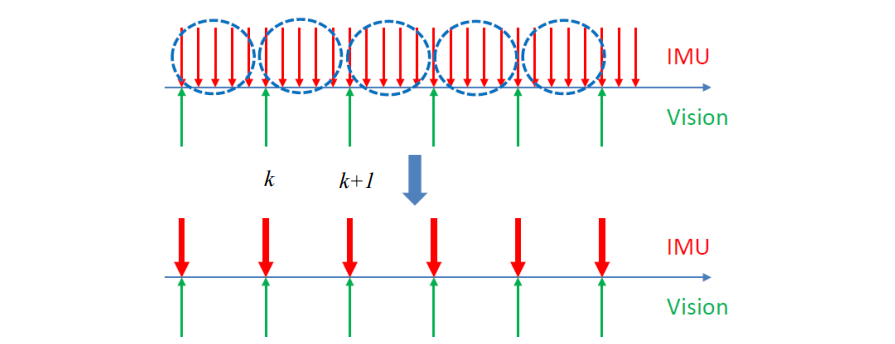
如图,IMU 量测值频率远高于时间量测,假设了短时间内的积分项为常数,将第
IMU(Inertial measurement unit)惯性测量单元,包括加速度计和角速度。加速度计用于测量物体的加速度,陀螺仪可以测量物体的三轴角速度。
惯性导航的核心原理基于牛顿第二定律,即位置的导数等于速度,速度的导数等于加速度。如果我们假设参考坐标系下载体的初始速度和初始位置已知,利用载体运动过程中参考系下的加速度信息,就可以不断地进行积分运算,更新实时的速度和位置。但实际的情况与理想不同:
-
加速度是由与载体固连的加速度计测量得到的(会跟随载体转动),每一时刻的加速度都是在当前的载体系下得到的,进行速度和位置的积分,前提是把这些加速度都统一到同一个坐标系下。更新姿态的作用就在于此——通过实时更新姿态,我们可以求得当前载体系相对于参考系的姿态,从而将载体系下的加速度测量投影到参考系下。
-
由于加速度计的测量原理,它敏感到的“加速度”实际上不是纯加速度,而是包含了反向重力加速度、向心力等有害加速度的比力。
-
传感器总是存在噪声的,惯性导航这种积分运算,必然使得 IMU 器件中的测量噪声不断的累积,从而造成定位和姿态误差,尤其是低精度 IMU 会极快发散。
传统捷联惯导的递推算法,以初始状态为基础,利用 IMU 测量得到的比力和角速度信息进行积分运算,实时更新载体的位姿及速度等状态,根据这种思路,如果知道上一帧图像采样时刻载体的位姿和速度,则可以根据两帧之间的 IMU 测量(角速度和比力)递推得到当前帧的位姿和速度。
在基于 BA 的视觉惯性融合算法中,各个节点的载体状态都是有待优化的量。IMU 预积分的初衷,是希望借鉴纯视觉 SLAM 中图优化的思想,将帧与帧之间 IMU 相对测量信息转换为约束节点(载体位姿)的边参与到优化框架中。IMU 预积分理论最大的贡献是对这些 IMU 相对测量进行处理,使得它与绝对位姿解耦(或者只需要线性运算就可以进行校正),从而大大提高优化速度。