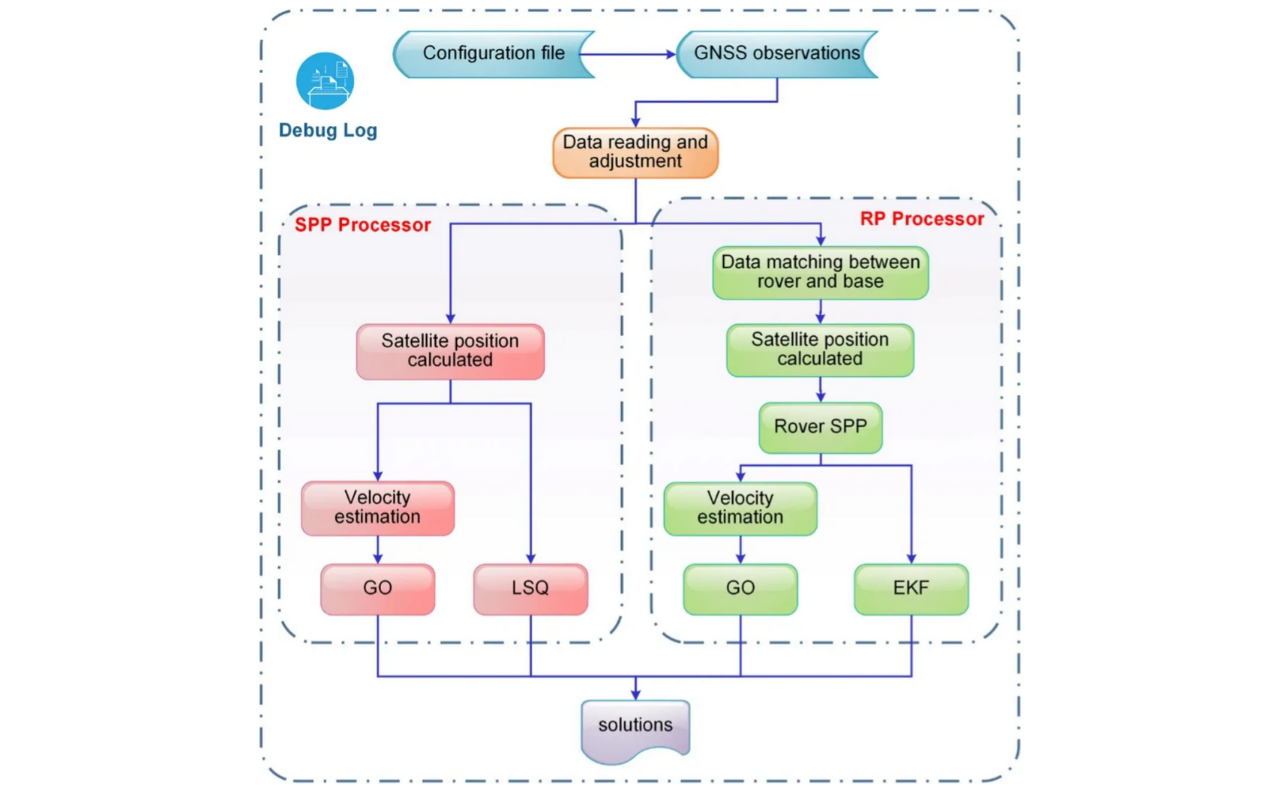
POSGO,全称 POSition based on Graph Optimization,是由武汉大学 GNSS 定轨中心李政开源的一套图优化 GNSS 伪距定位程序。该程序目前主要侧重于以伪距为核心的 SPP(单点定位)和 RTD(实时伪距差分定位)解算,并兼容 EKF(扩展卡尔曼滤波器)和 GO(图优化)解算方法。整个项目涵盖了约 8000行的 C++ 代码和 700 行的 Python 脚本,C++ 部分的代码在 RTKLIB 的基础上,进行了面向对象的改编和优化;Python 部分则包含了 Analyze 和 AnalyzeStatic 两个结果分析脚本。POSGO 使用了来自城市道路的动态车辆手机实验数据进行测试。实验结果显示,在遮挡严重的区域,GO解算方法相较于传统的 LS(最小二乘法)和 EKF 解算方法,展现出了更高的定位精度和更强的稳健性。POSGO 未来计划引入对载波相位的支持,以进一步提升定位的精准度,并计划加入对多传感器融合的支持。
| 文件 | 说明 | File | Code |
|---|---|---|---|
| common | 98 | 3916 | |
| debug | 8 | 215 | |
| ephmeris | 17 | 434 | |
| gnss | 71 | 2271 | |
| gnss_ins_lc | 4 | 201 | |
| gnss_ins_tc | 41 | 1895 | |
| gui | 15 | 1047 | |
| ins | 12 | 307 | |
| main_func | 6 | 266 | |
| plot | 9 | 513 | |
| read_file | 38 | 2144 | |
| tides | 6 | 134 |
算法特点:
- 在进行正式解算之前,会先进行多普勒定速计算;
- 支持 IGG3 和 HUber 抗差核函数;
- 每个历元解算结束,进行卡方、PDOP、抗差阈值检验;
